Topic encountered in laser scanning. This is more of a MLS application. The practical involved using RandLA-Net.
The rail environment is pretty much standardized these days, with known shapes and sizes. One application could be monitoring track deformations and nearby vegetation.
The road environment is a little bit less standardized, but the main idea still revolves around lanes, cars, people, traffic signs, etc. One application could be monitoring the road surface, vegetation, rocks, visibility analyses, etc.
Object Detection and Scene Classification
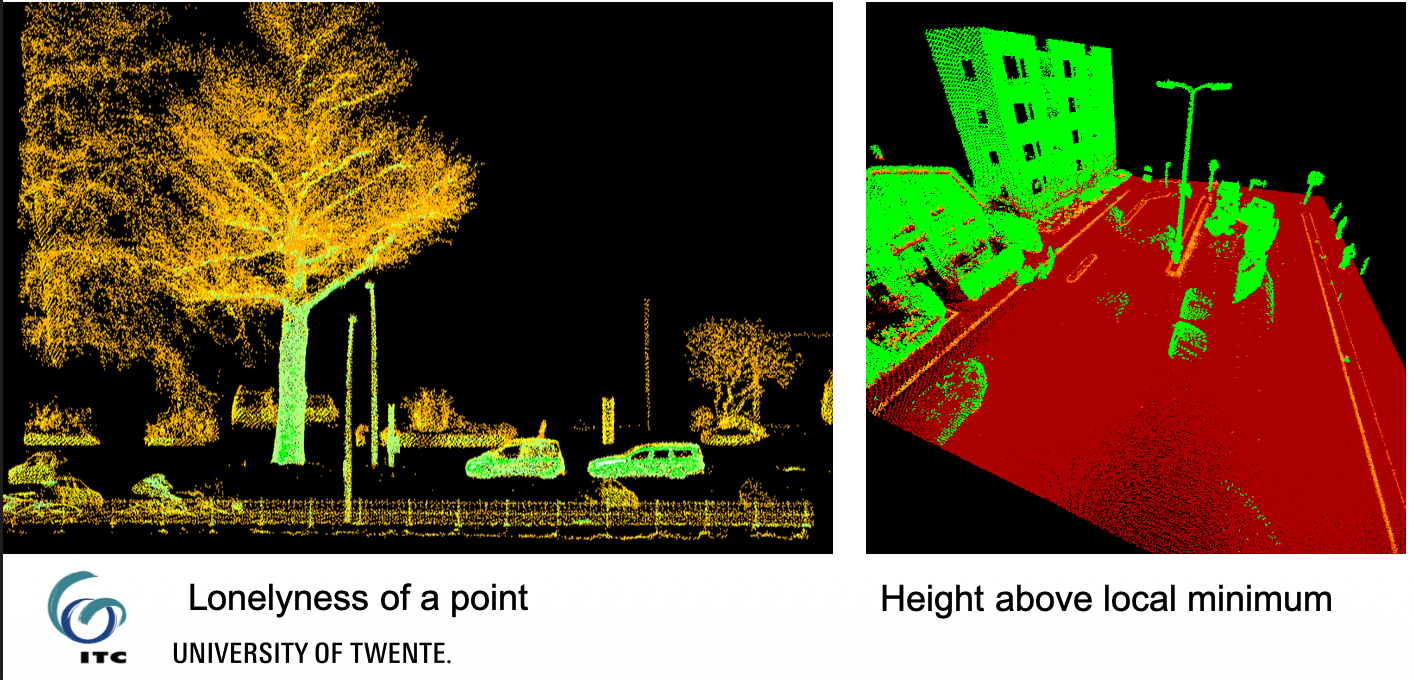
It helps massively if you know what you are looking for. Take the Figures below for example.
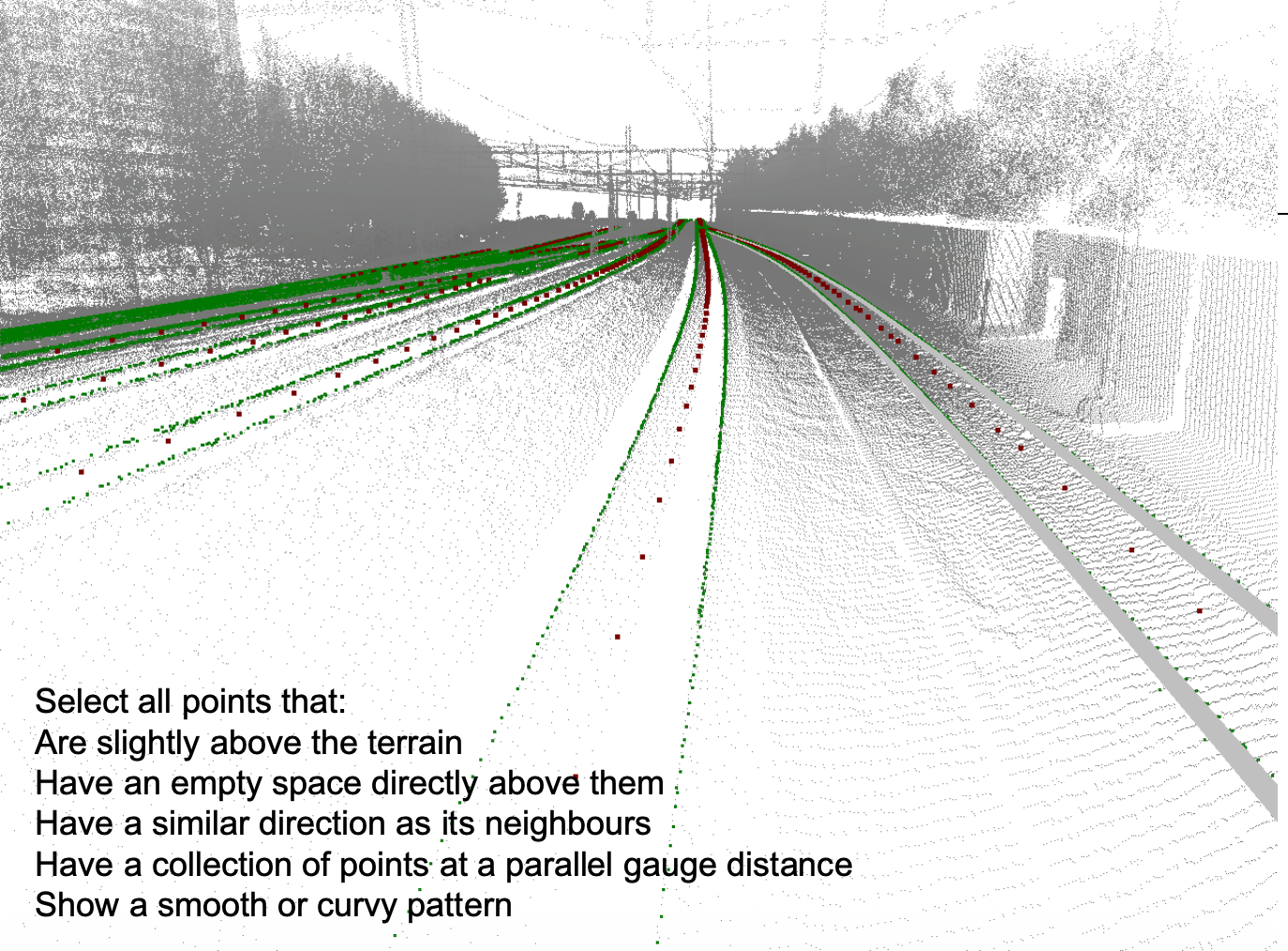
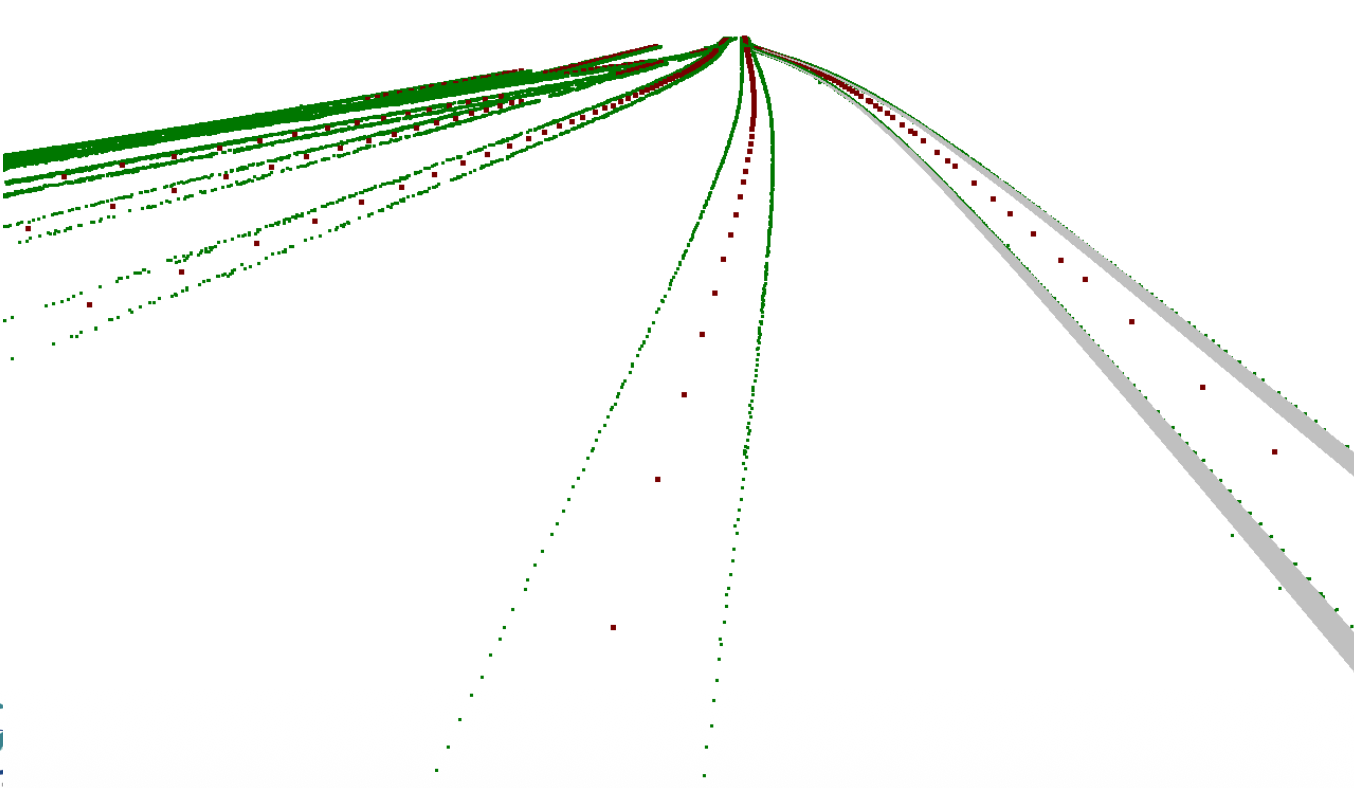
Scene classification and object detection rely heavily on similarity measures. This involves using segment-based attributes like height histograms and bounding box dimensions, followed by correlation calculations across all other segments based on user-selected samples.
Furthermore, interpreting street furniture involves decomposing pole-like structures using 3D shape, reflectance(material properties), geometric(bbox), and contextual features such as relative heights, angles and relative positions among poles and their attached components.
Trajectory and Positioning Enhancement
Mobile Mapping (MM) Lidar positioning is significantly enhanced by matching it with stereo aerial images to extract 3D tie points. These tie points serve as additional observations to continuously adjust the 6 Degrees of Freedom (DoF) trajectory over time using B-splines. Focusing on high-quality tie points improves trajectory accuracy from 25-50 cm down to 10-15 cm, proving more effective than simply using all available tie points. The idea is nicely visualized below.
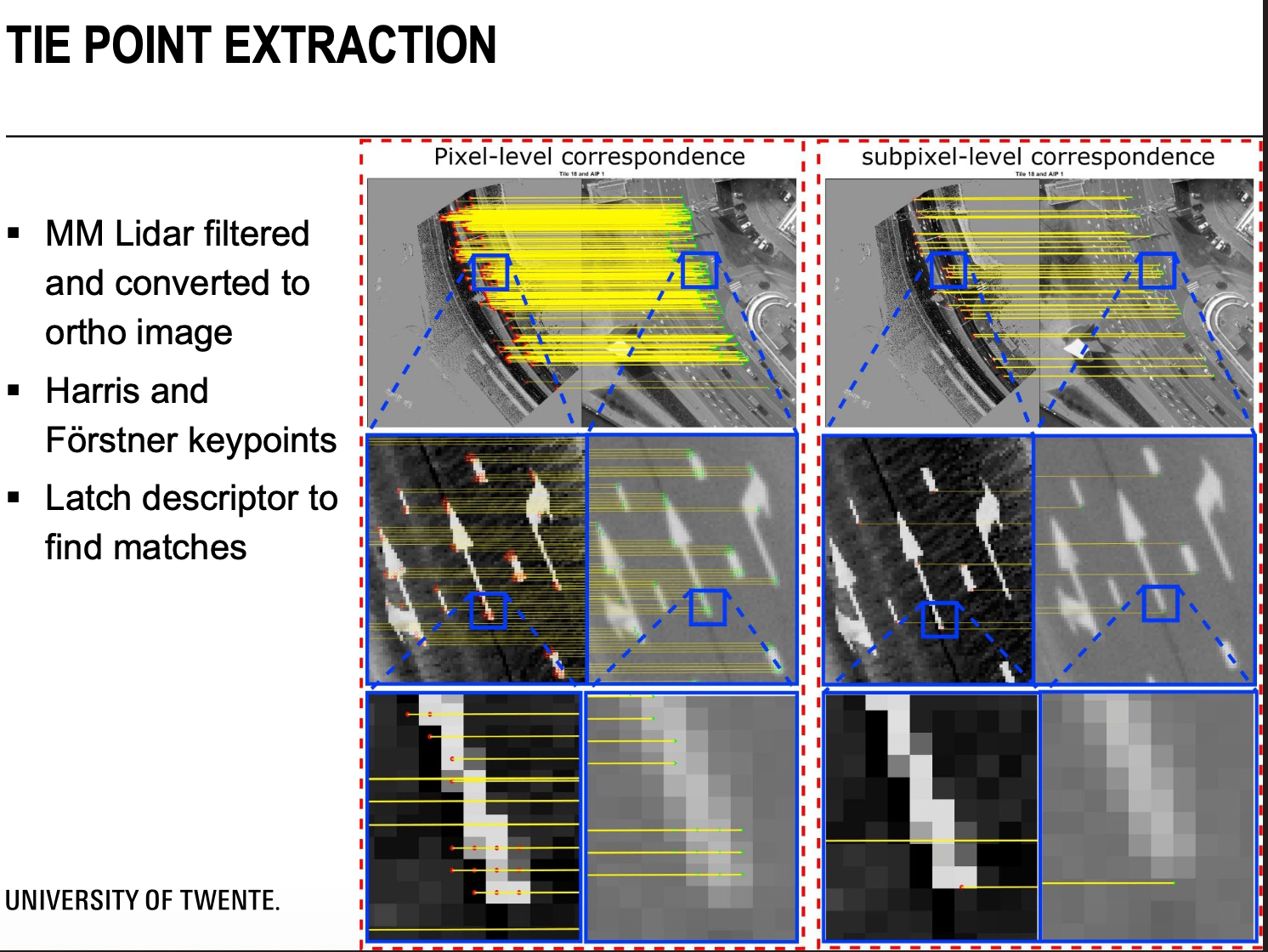
- filter the MM Lidar and covert to ortho image
- detect keypoints
- find matches with the stereo aerial images and extract the tie points
Updating the spline coefficients involves a fusion between all the sensors from GNSS to IMU. Even the observation of the tie points help. I am not going in detail, but Hussnain et al, 2018 provides it if necessary.
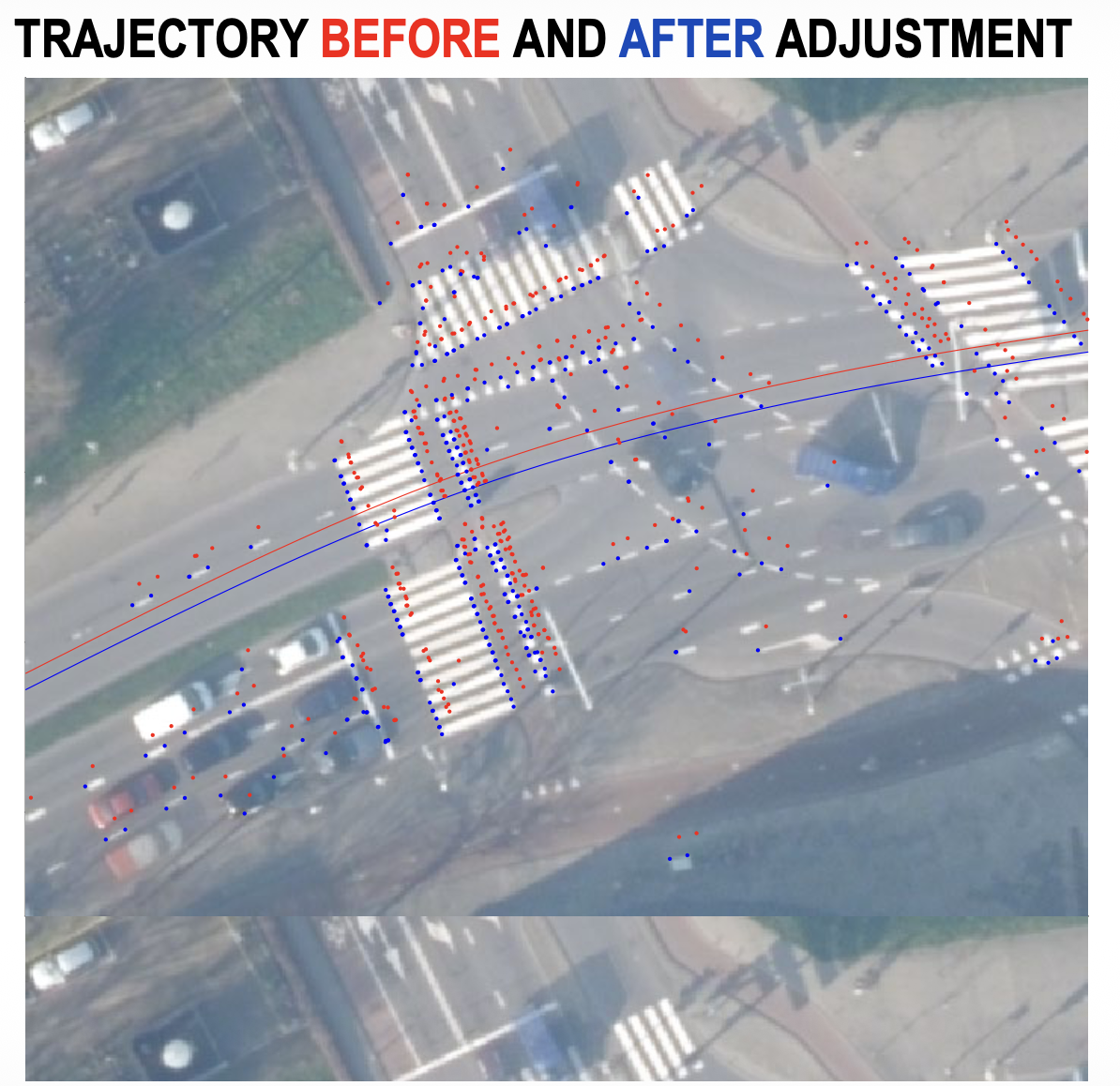
I guess the idea is the 3D tie points are successfully used for trajectory adjustment. Which means that orientation and overlap of aerial images is important.
Application in Autonomous Driving
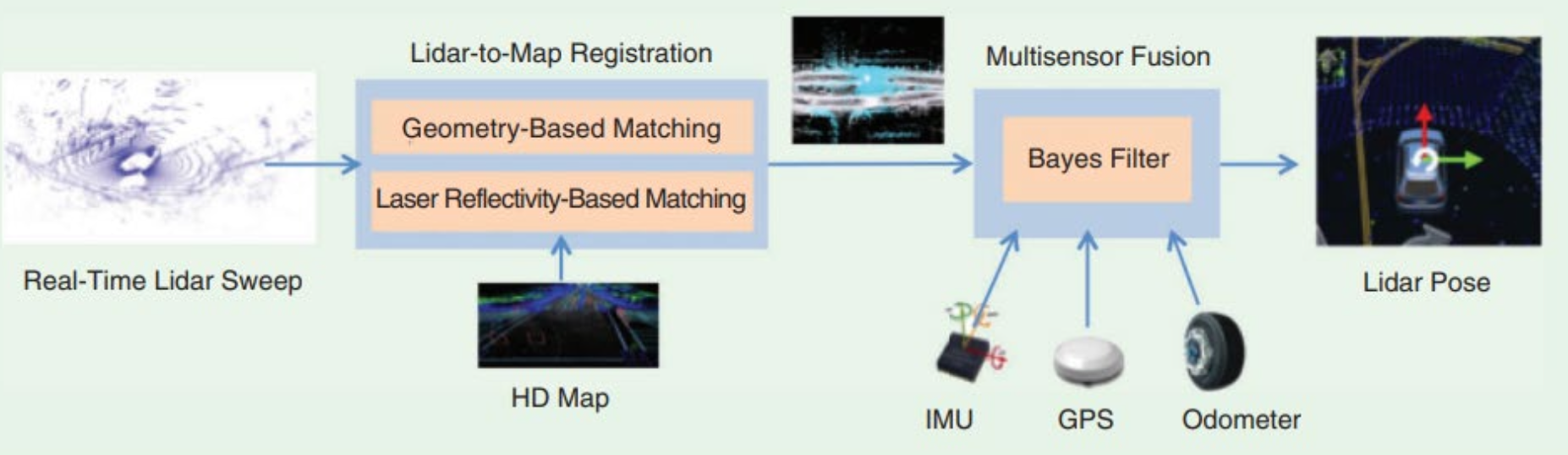
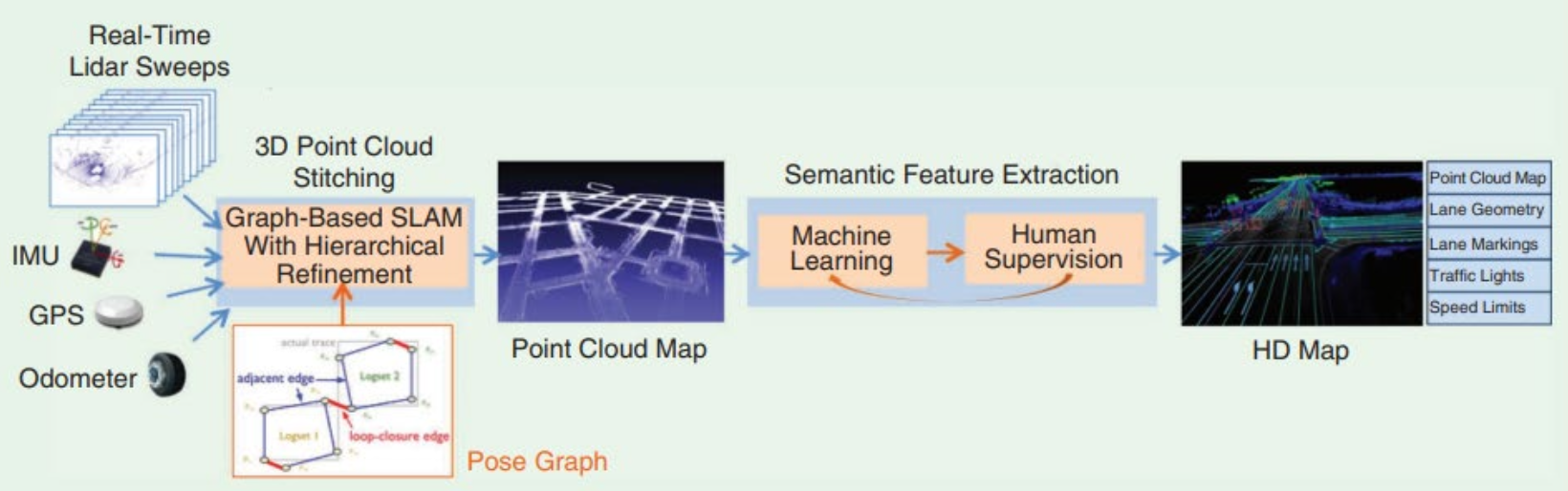
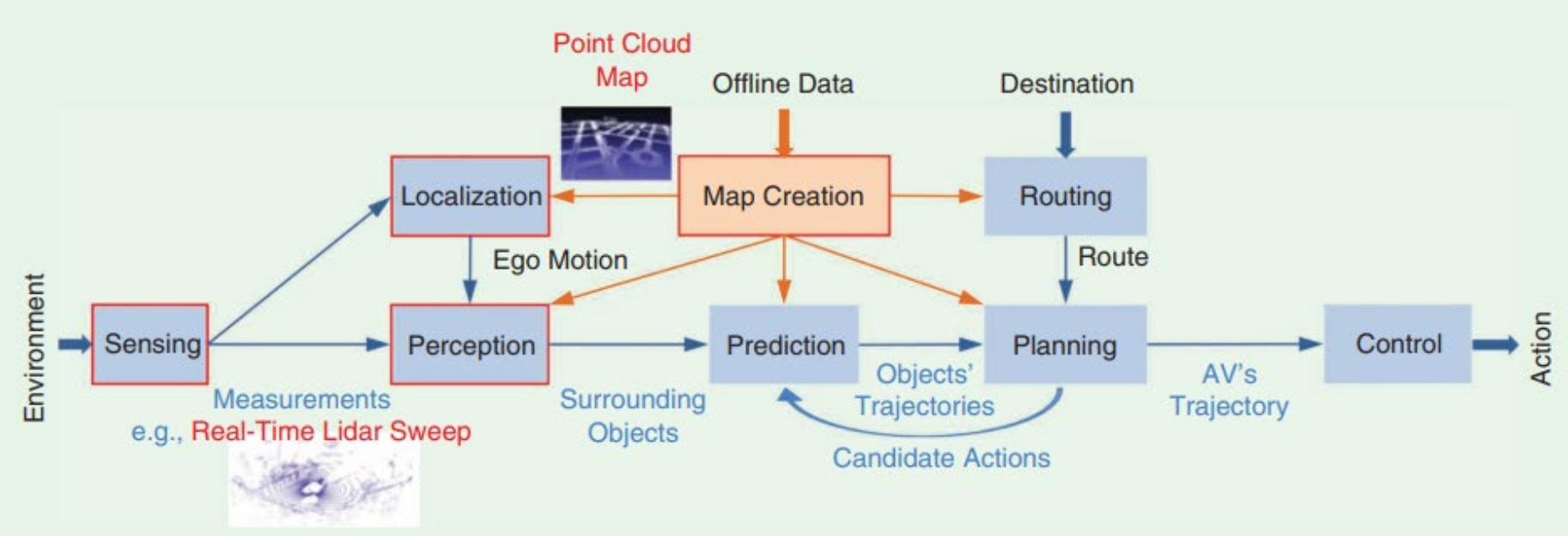
Real-time Lidar processing is crucial for autonomous systems. Sparse real-time Lidar sweeps are registered against an Offline HD Map using both geometry-based and laser reflectivity-based matching. The Offline HD Map provides essential correctness and completeness, allowing for the application of traffic rules and thorough semantic feature extraction. A major challenge in semantic segmentation for these complex environments remains dealing with minority classes and a lack of sufficient training data.