Related to Coordinate Frame.
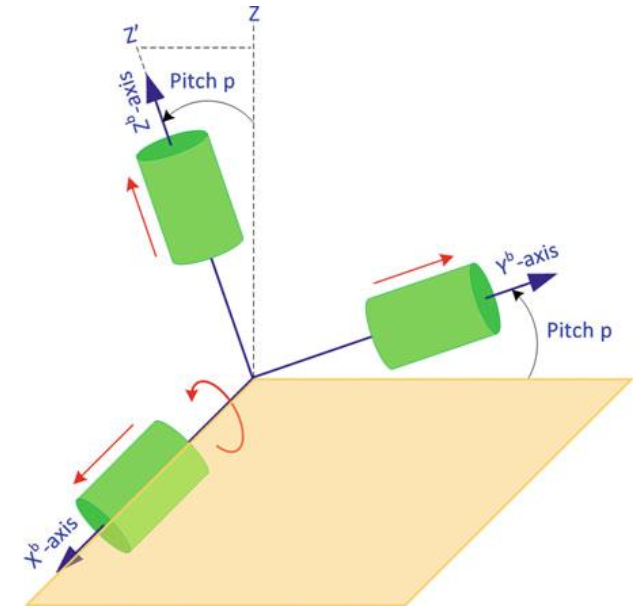
So I will explain on this example. We know the three rotational matrices.
R_x(p):
R_y(r):
R_z(ψ):
If I apply rotation on x axis (pitch), and then on y axis (roll) and at the end on z axis (yaw), the final rotational matrix will be
But why does come first??
It doesn’t, you muppet. Think of it as functions. If you want to apply and then , you would write , right?
So, if I apply rotation on X axis first and then on Y axis, I get . To get accelerations, multiply by gravity vector (assuming gravity points down z-axis initially).
Small exercise: Angular Velocities
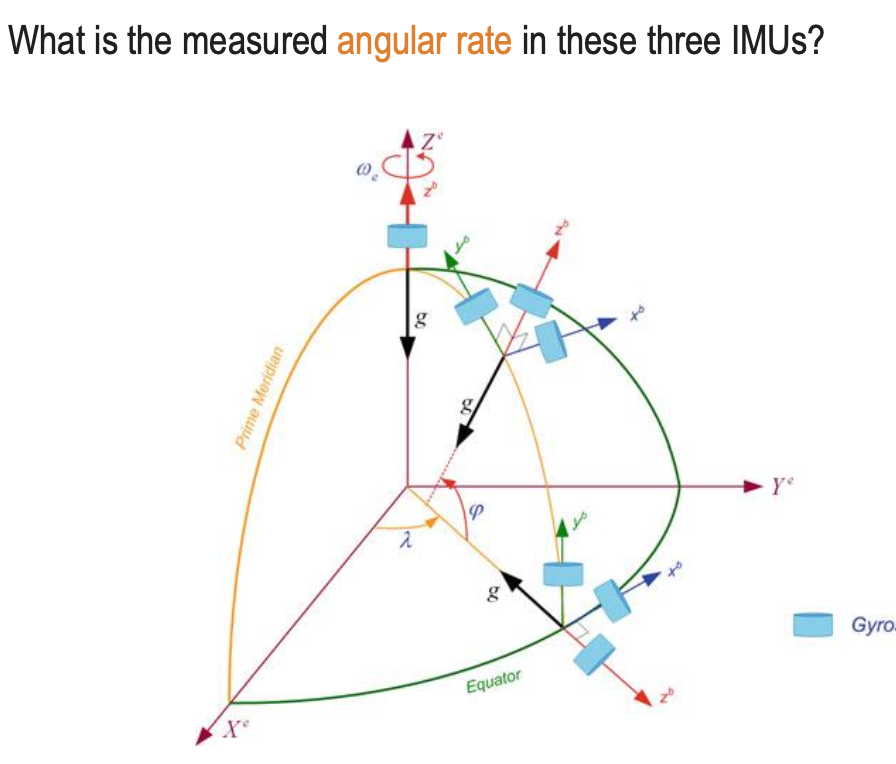
- Considering that Z points is the pure vertical.
- The earth only rotates East-West (y axis) and vertically (z axis)
- will be 0 for all cases.
- takes values for Equator (Earth’s rotation along the y-axis, tangent to surface) and for Arbitrary position
- takes values for North Pole and arbitrary position
| Equator | Arbitrary position* | North pole | |
|---|---|---|---|
| ω_x | 0 | 0 | 0 |
| ω_y | ω_e | cos(ω_e) | 0 |
| ω_z | 0 | sin(ω_e) | ω_e |
Note: if the direction of the true north is unknown, but the z axis is still pointing upwards, we may write
Since it is not known how the cos component is divided between x and y axes, this holds because
Safe to say I don’t really understand what this all is. I will just stick to the first question I asked above.