Coordinate Frame
When thinking about the 3-axis coordinate frame; I always use this representation
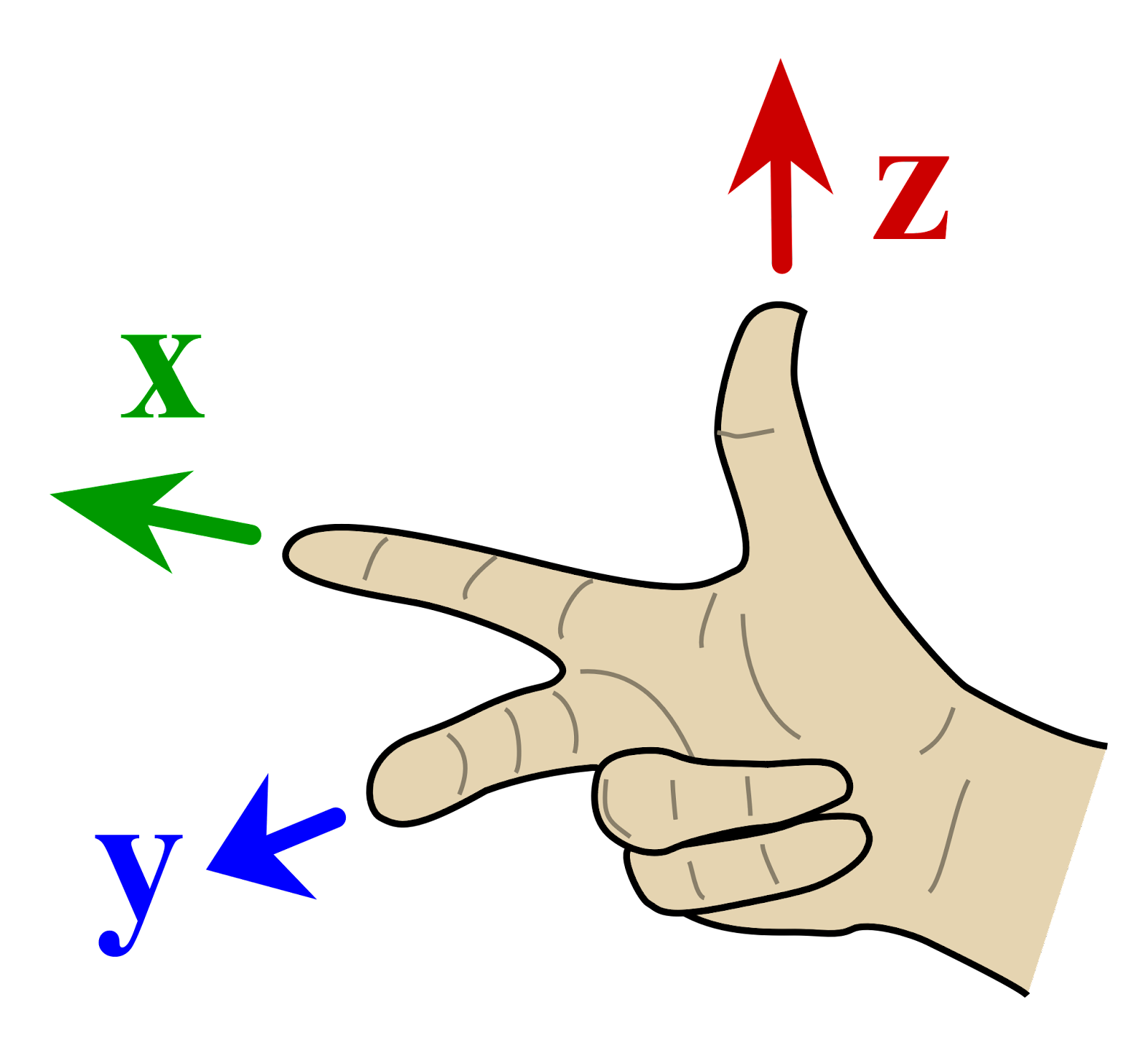
In Robot (Canonical) Frames we have
X forward, Y left, Z up
But apparently this is only for Robotics applications.
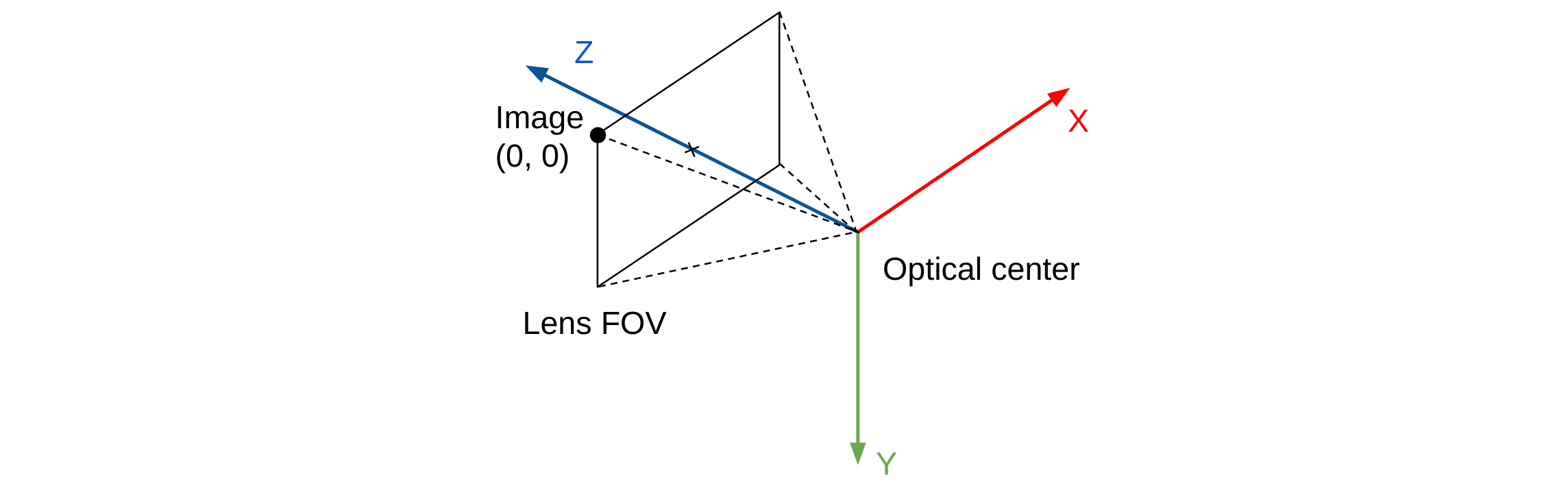
In Optical Frames we have
X right, y down, z forward
This is because an image is drawn on the
x-yplane
So in SeaClear I have to assign a global coordinate frame.
The situation does that I have 2 different camera streams with 2 different point of views
The
GoProgives abird-eye-viewand theUSB Cameraprovides more of a humanly perspective over the pool.But they see the same
ArUcomarker and get both thetranslation and rotation vectorsfrom the built-in aruco functions from OpenCV. So I know both camera coordinates in the ArUco frame!I must convert the coordinates of the ROV from both perspectives by doing Transformations. In ROS, this is done through the tf2 library.