Related: SeaClear, Coordinate Frames
I used this concept to determine the position of the underwater robot in a pool, while taking the refraction of the water into consideration.
With this, I converted a 2D pixel coordinates into 3D world points, accounting for light refraction at the air-water interface
I assumed
- World Frame: Origin at ArUco marker, Z pointing up
- Camera Frame: Origin at camera optical center
I get some nasty errors, likely due to the distortion parameters, since I implemented this refraction with the water. I could definitely see some improvements in the distances (especially around the edges of the FOV again).

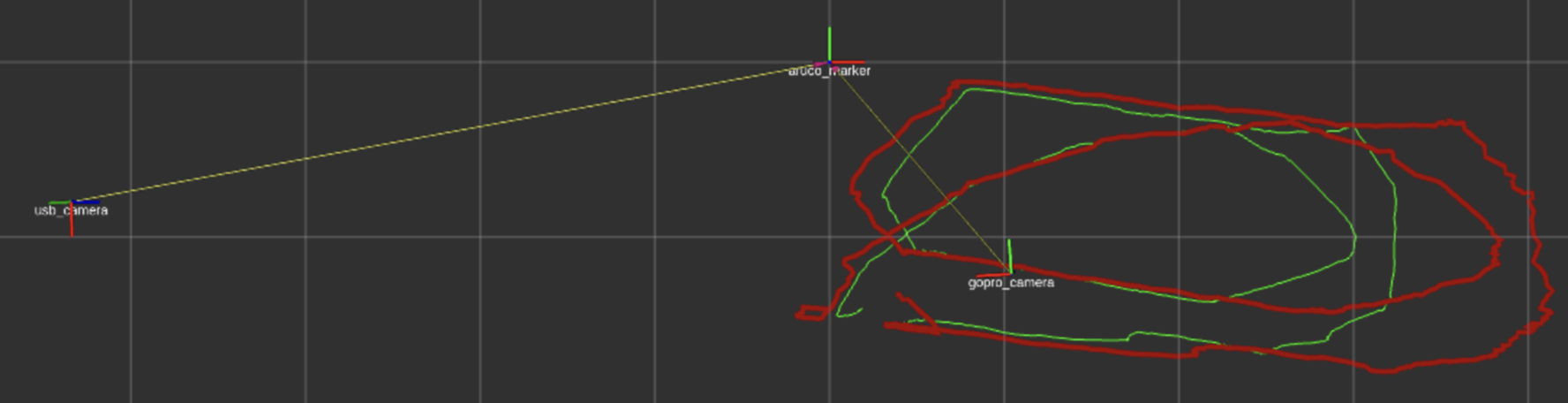
Basically what happens: when I get to the edge of the FOV in the UsbCamera frame, I get some nasty drift (you can see in the plot image). I highly believe this is a problem because of the setup (I will make a page shortly on that -- how to ensure a good setup when working with multiple cameras) and also because of the poor quality of the ArduCam. Even though I calibrated with many decimals for the distortion, I still get that drift.
Convert Pixel to normalized camera coordinates
pts = np.array([[[pixel_x, pixel_y]]], dtype=np.float64)
x_n, y_n = cv2.undistortPoints(pts, K, dist_coeffs)[0,0]
dC = np.array([x_n, y_n, 1.0], dtype=np.float64) # not unit
d_air_W = camera_orientation @ dC
o_W = camera_center- Take the raw pixel coordinates (pixel_x, pixel_y)
- Remove lens distortion with
cv2.undistortPoints(performs the inverse)
- The intrinsic matrix maps 3D camera points to pixels:
- represents where a ray through that pixel intersects plane in camera coordinates.
d_air_Wis the direction vector of a ray in world coordinates, starting at the camera center (o_W) and going towards the pixel, before refractioncamera_orientationis the rotation matrix R from camera frame to world framecamera_centeris the camera position in world coordinates from the ArUco detection. I got it by using Rodrigues’ Rotation Formula.
Camera coordinate system:
Z (forward, into scene)
^
|
| • (x_n, y_n, 1) <-- point on image plane
| /
| /
| /
o───────→ X (right)
/
↓
Y (down)
Intersect with water surface (z=0)
denom = d_air_W[2]
s0 = (0.0 - o_W[2]) / denom
if s0 <= 0:
rospy.logwarn(f"Ray does not intersect water surface, or camera is below water surface, camera_z = {o_W[2]}")
return None
I0_W = o_W + s0 * d_air_Wdenomis the z component of the rays0tells me how far I need to go along the ray to intersect the water surface plane z- If
s0⇒ it’s in front (valid) - If
s0⇒ it’s behind (invalid)
- If
I0_Wis the 3D intersection point of the incoming ray with the water surface plane (z )
o_W (camera)
\
\ s0 = distance to water
\
────────●────────── z = 0
I0_W
Compute Refracted Direction Into Water
n_surface_up = np.array([0.0, 0.0, 1.0])
d_in = d_air_W / np.linalg.norm(d_air_W)
d_wtr = self.refract_dir(d_in, n_surface_up, air_n, water_n)d_inis the unit direction vector of the ray in the air pointing towardsI0_Wd_wtris the refracted ray inside the water computed with Snell’s Law
AIR (n=1.0)
\ θ₁ (incident angle)
\
───────●───────── surface
/
/ θ₂ (refracted angle, smaller)
/
WATER (n=1.33)
Intersect refracted ray with plane z = depth (coming from IMU)
denom2 = d_wtr[2]
s1 = ((float(depth)) - I0_W[2]) / denom2
P_W = I0_W + s1 * d_wtrdenom2is the z component of the refracted ray direction- If
denom2⇒ Ray parallel to water surface after refraction - If
denom2⇒ ray pointing downward into the water
- If
s1tells me how far along the ray to travel to reach plane at depth levelP_Wis the 3D world point on the ROV’s depth plane that corresponds to the original pixel, AFTER refraction. This is what I want to get!! (reference + direction * distance)
─────────●─────────── z = 0 (X0_W)
\
\ d_wtr (refracted ray)
\
● P_W z = depth
Convert back to Camera Frame
R_CW = camera_orientation.T
p_C = R_CW @ (P_W - o_W)
return p_CR_CWis the rotation matrix that takes a world point to express it in the camera frame. I will let the TF library from ROS to handle the conversion back to world.p_Cis the 3D point in camera coordinates, which is then transformed to the ArUco marker frame by thetransform_point_to_worldfunction. We subtractP_W - o_Wto get the relative distant from the camera to that exact point under water.
Why refraction matters
What camera “sees” VERSUS Actual position:
camera camera
\ \
\ \
──────●──── surface ───────●────
| \
| (straight line) \ (bent ray)
| \
● <-- wrong position ● <-- correct position
The error increases with
- depth
- viewing angle (rays at edge bend more)