The basic pinhole model
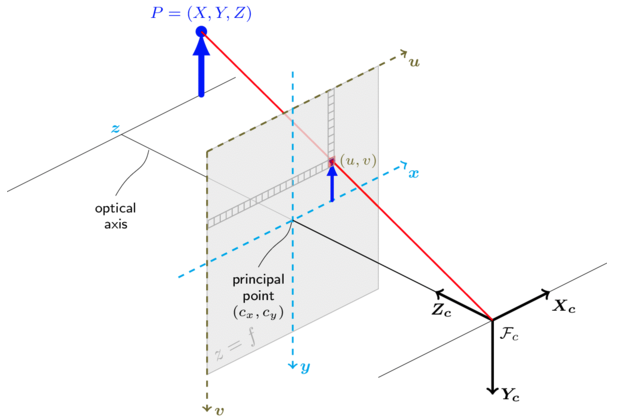
We consider the central projection of points in space onto a plane. Let the centre of projection be the origin of a Euclidean coordinate system, and consider the plane , which is called the image plane or focal plane. Under the pinhole camera model, a point in space with coordinates is mapped to the point on the image plane where a line joining the point X to the centre of projection meets the image plane.
By similar triangles, one quickly computes that the point is mapped to the point on the image plane. Ignoring the final image coordinate, we see that
describes the central projection mapping from world to image coordinates. This is a mapping from Euclidean 3-space to Euclidean 2-space .