Lecture 9 from optimal estimation.
The number of particles is important.
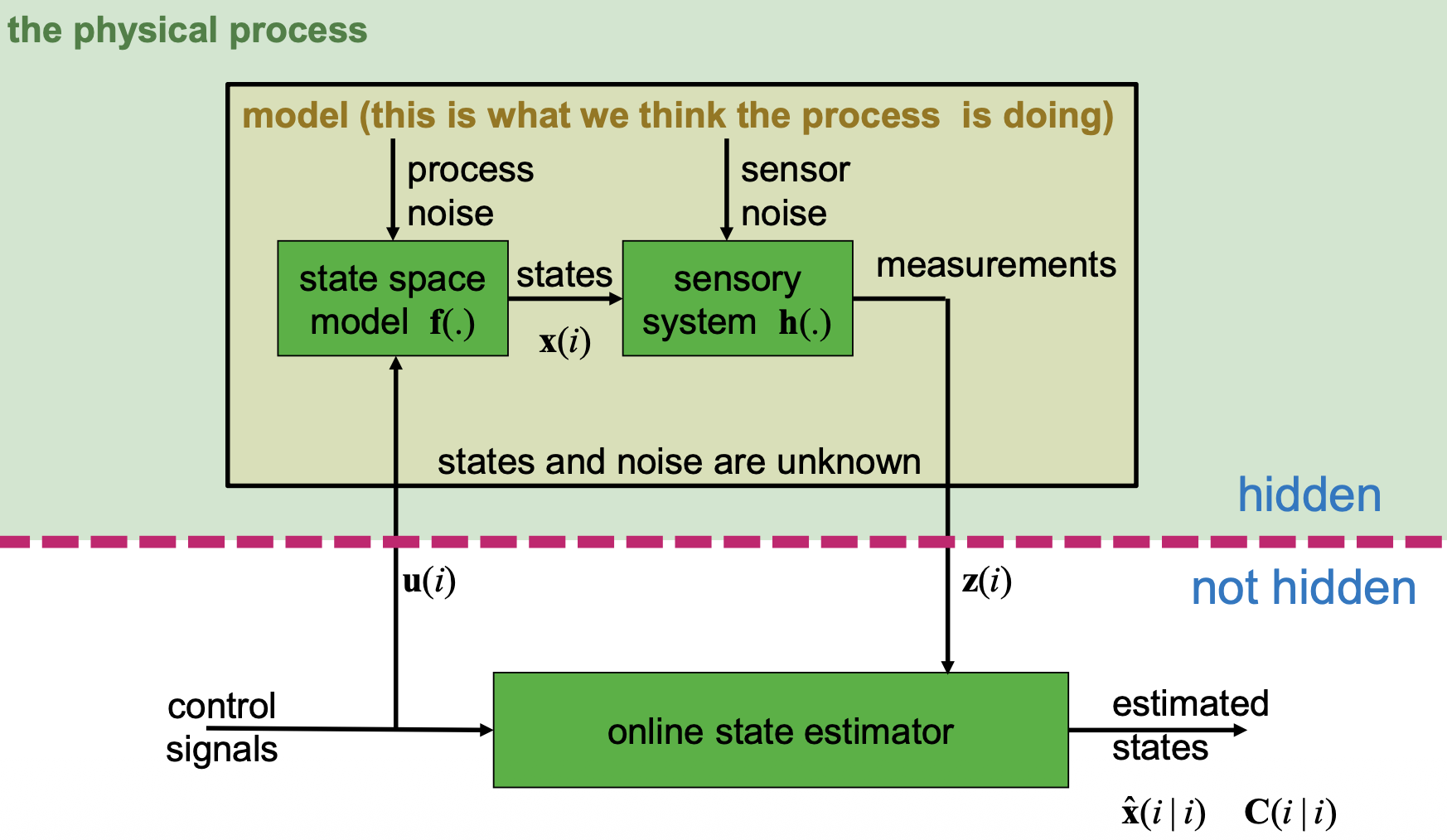
We need a physical process (the hidden part) and a online state estimator (not hidden). It is not only for physical processes, you can also apply it for financial applications, covid pandemics extensions etc.
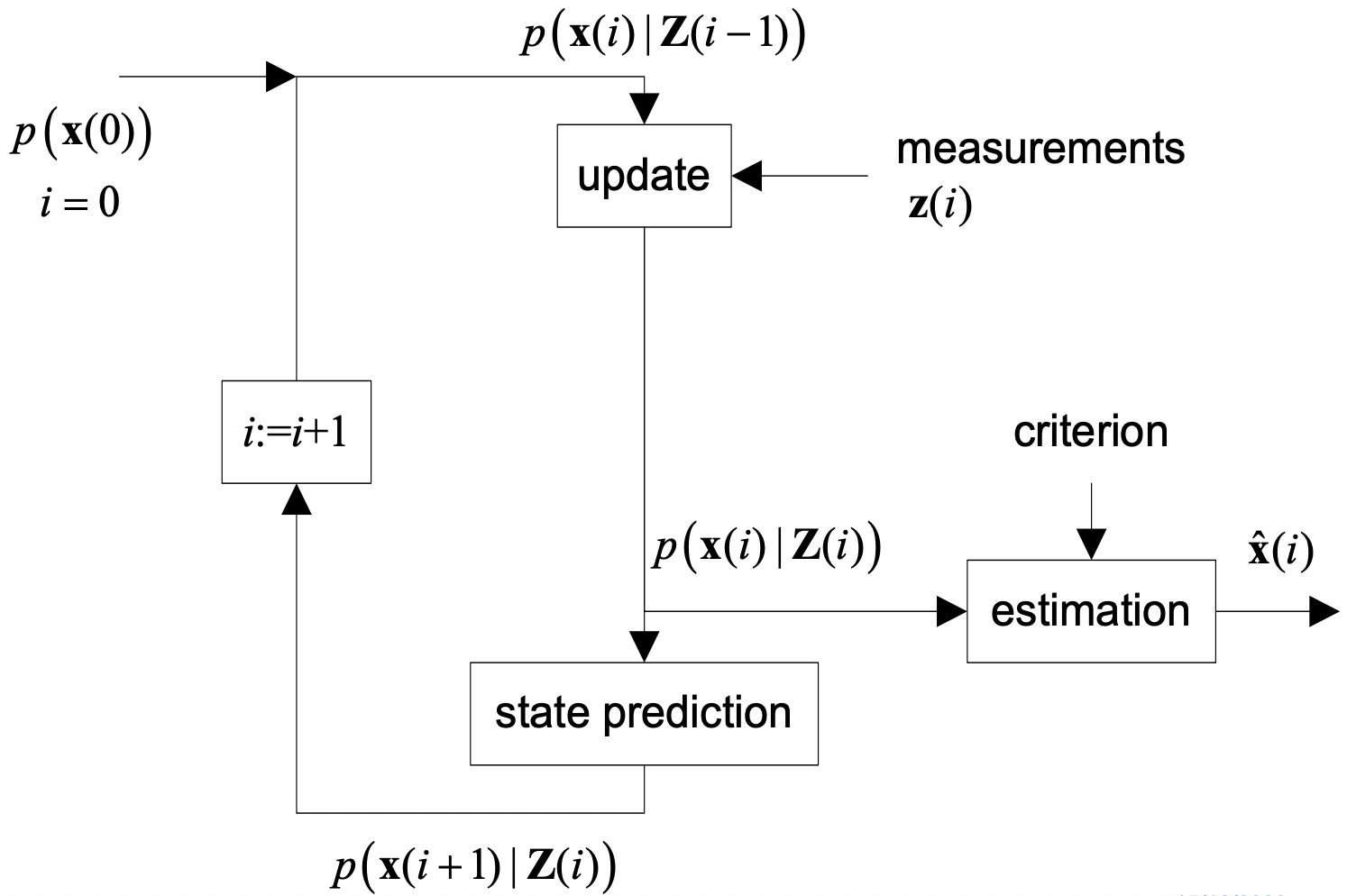
the Transition Probability Density helps us get from one state to another.
General outline of optimal filter
Particle Filter relates highly to Monte Carlo.
Apparently, with the dirac function I go from 2D to 3D. , everywhere except at .
In this case, the delta function is the same (unweighted). If I go into weighted delta function, the dirac will have different peaks.
Parzen Estimate instead of Dirac function
It is continuous now. And it’s also shaped as a interpolation function (PDF) through all those dirac functions. And you get a less spiky interpretation.
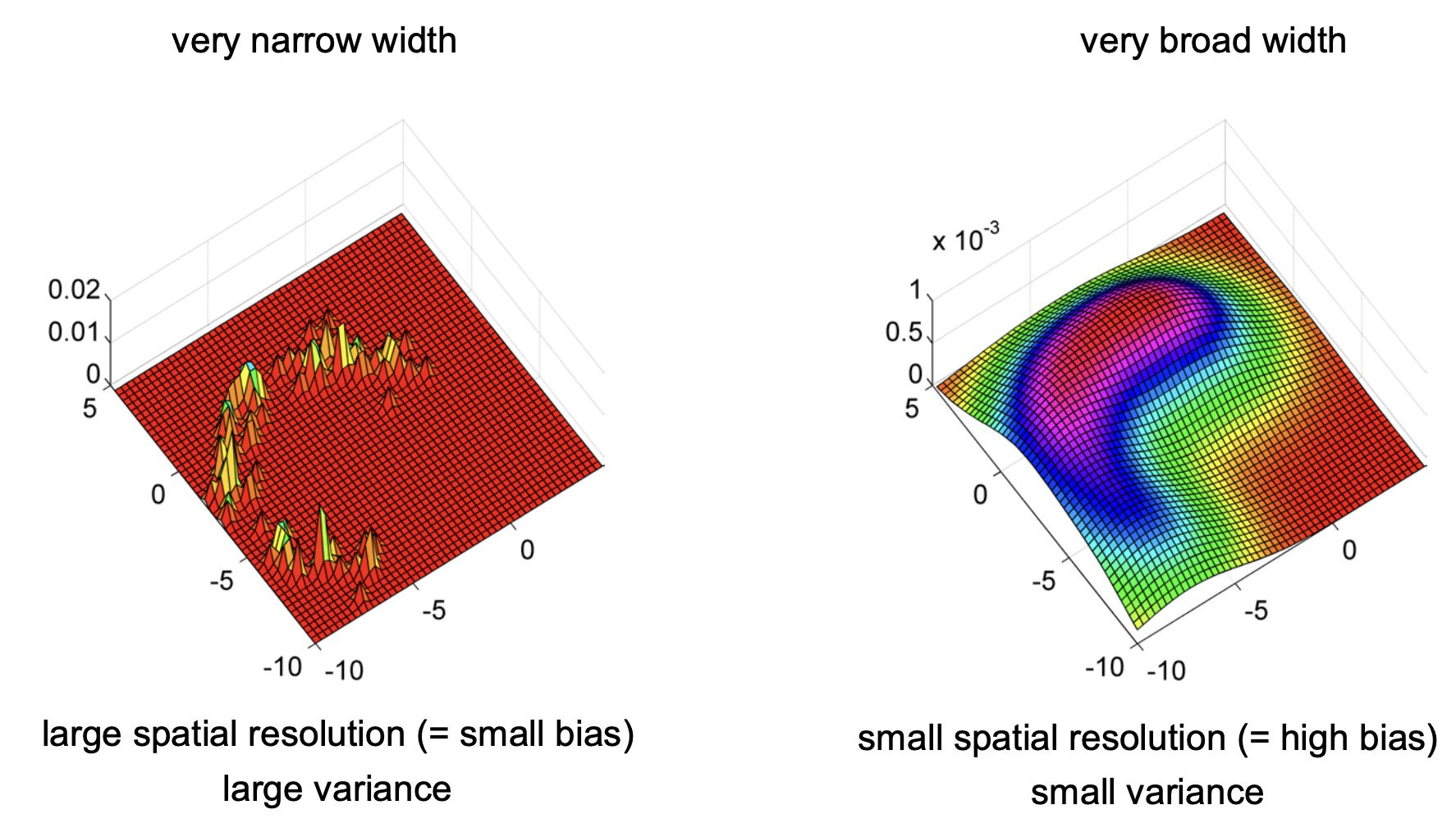
If you trust your data, you could go with left. Also, it depends on the number of particles.
There is a price to pay when you represent the PDF in different ways. You have to find some parameters. Try to understand what that 68 means.
Resampling
So the idea is you don’t know what the true PDF looks like. And with resampled, unweighted particle representation, we could get somewhat close.
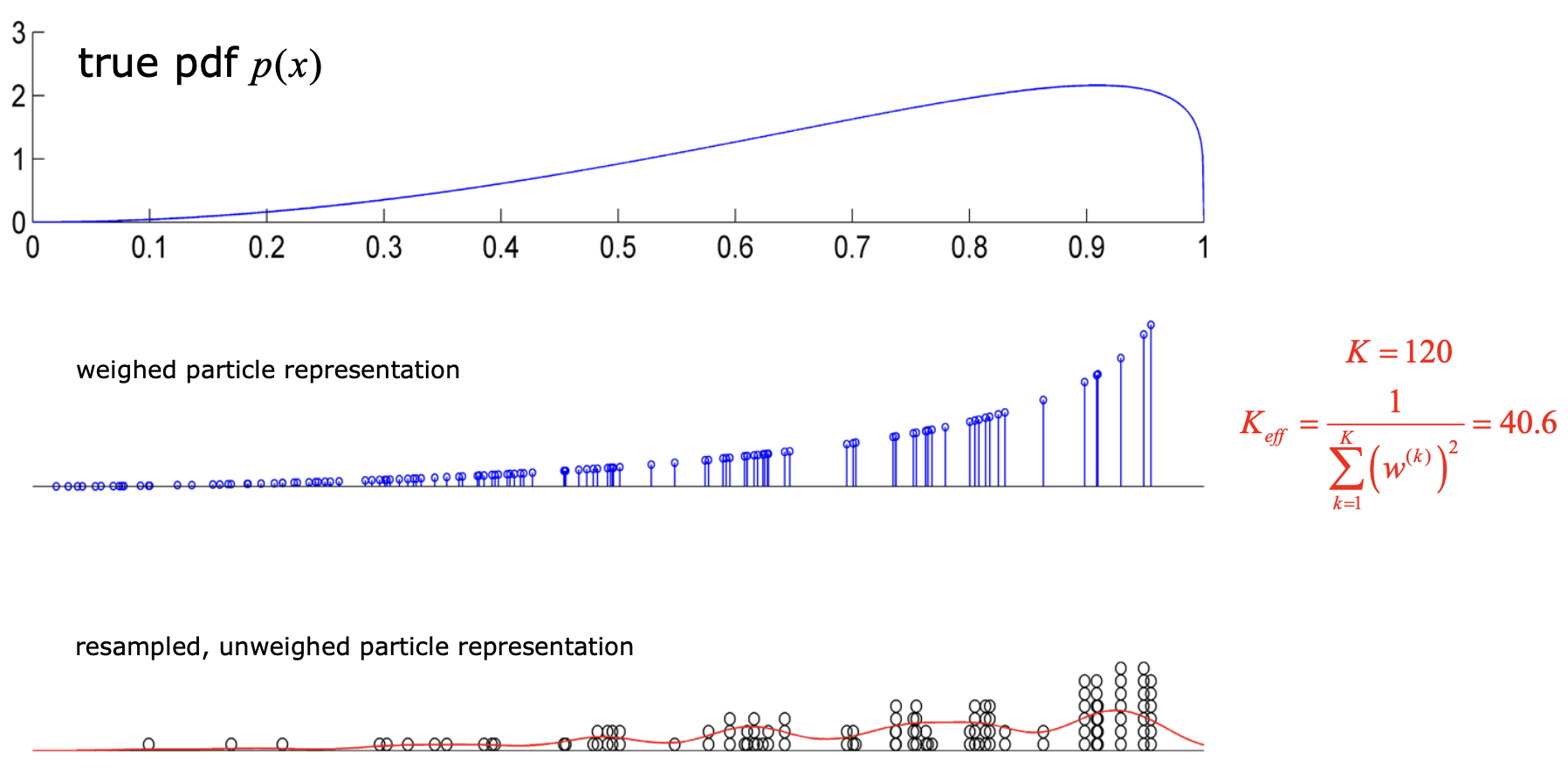
Large particles get chosen multiple times. Therefore, we can compute to reduce the number from 120 to 40.6 (check this line, I’m not sure that’s what it means). This is less accurate from a statistical perspective. With the weighted repr. you get the height, and with resampled, unweighted, we get the areas? Again check
You could approximate when you don’t really trust your measurements. Just as a small curiosity I asked. But usually you do want to take them into account.