The estimation paradigm involves taking a control signal (like engine thrust) and sensor data (such as range or speed) to determine the estimated properties of an object, such as its position, orientation, or velocity.
Key Components
- Dynamic & Kinematic Models: Mathematical equations that describe how a system changes over time.
- Process Noise: Unpredictable factors that cause a real track to deviate from a planned path. While noise itself cannot be predicted, the uncertainty it creates can be quantified.
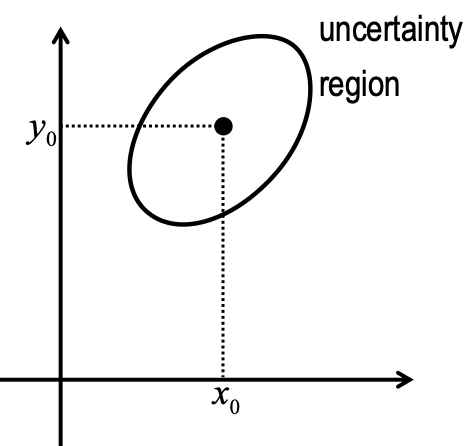
- Uncertainty Regions: Areas where an object is likely to be (e.g., a 91% probability region). These are mathematically represented by covariance matrices.
Therefore, an uncertain position is quantified by:
- the position of the uncertainty region: i.e. the expectation of the position,
- the size and shape of the region (the covariance matrix) .
Linearization through Taylor Series Expansion
From the nonlinear state equation:
If we apply 1st order Taylor Series, we get the linearized state equation:
We can define the linear state equation under this format:
In the previous kinematic model, .
The propagation of uncertainty in time can be described mathematically by modelling how the covariance matrix changes in time.
where:
We define the statistical definition of process noise:
And the statistical definition of initial conditions:
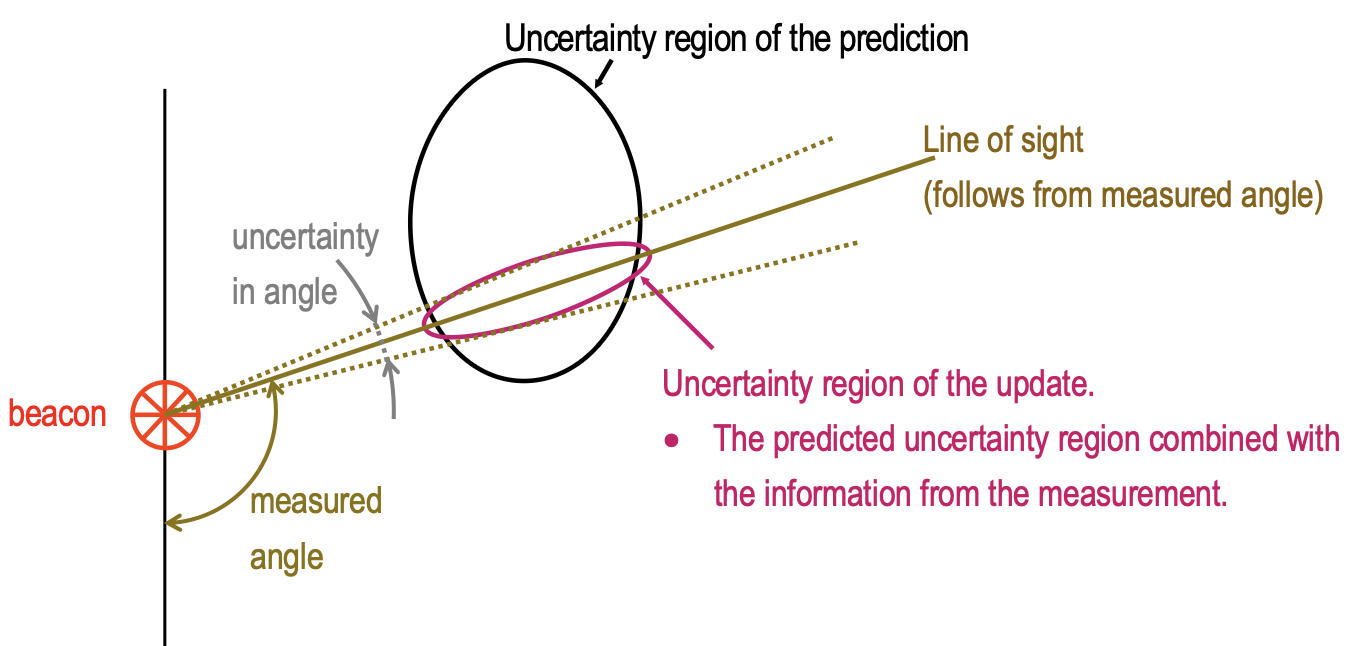
Updating = Prediction + Measurement
Basically, when the uncertainty of the prediction becomes too large, we perform measurements to calculate a new uncertainty region and recalculate the path.
Dead reckoning is simply estimating your future position given your current position and relative measurements.
- Here we use the first starting point as the reference position.
- If we make a loop along a coastline, we know the last point should be the initial point. Error comes from drift.
I guess we could call it a SLAM problem when we use landmarks (beacons) to anchor our positions.
Chapters from the book to look over for this part:
- 3 — parameter estimation (partly)
- 4 — state estimation
- 8 — state estimation in practice
- 9.3 — worked out example