First part was basically an introduction to control engineering, where you use the sensors to sense the world and compute new inputs for the robot through closed-loop or open-loop architecture.
Layers in Embedded Control Software
In the sequence control, i can just provide the way points. I can put it in a loop
I can put the control loop in another loop.
So the ticker functions could just call an interrupt.
The encoder keeps sending a signal. You cannot afford to lose a count from it. Then the loop control (low-level control) should use some kind of interrupt. This is in case I don’t want to miss that event.
- HRT (Hard real-time)
- FRT (Firm real-time) — “I can tolerate a few missed deadlines, but not any more than ”
- SRT (Soft real-time)
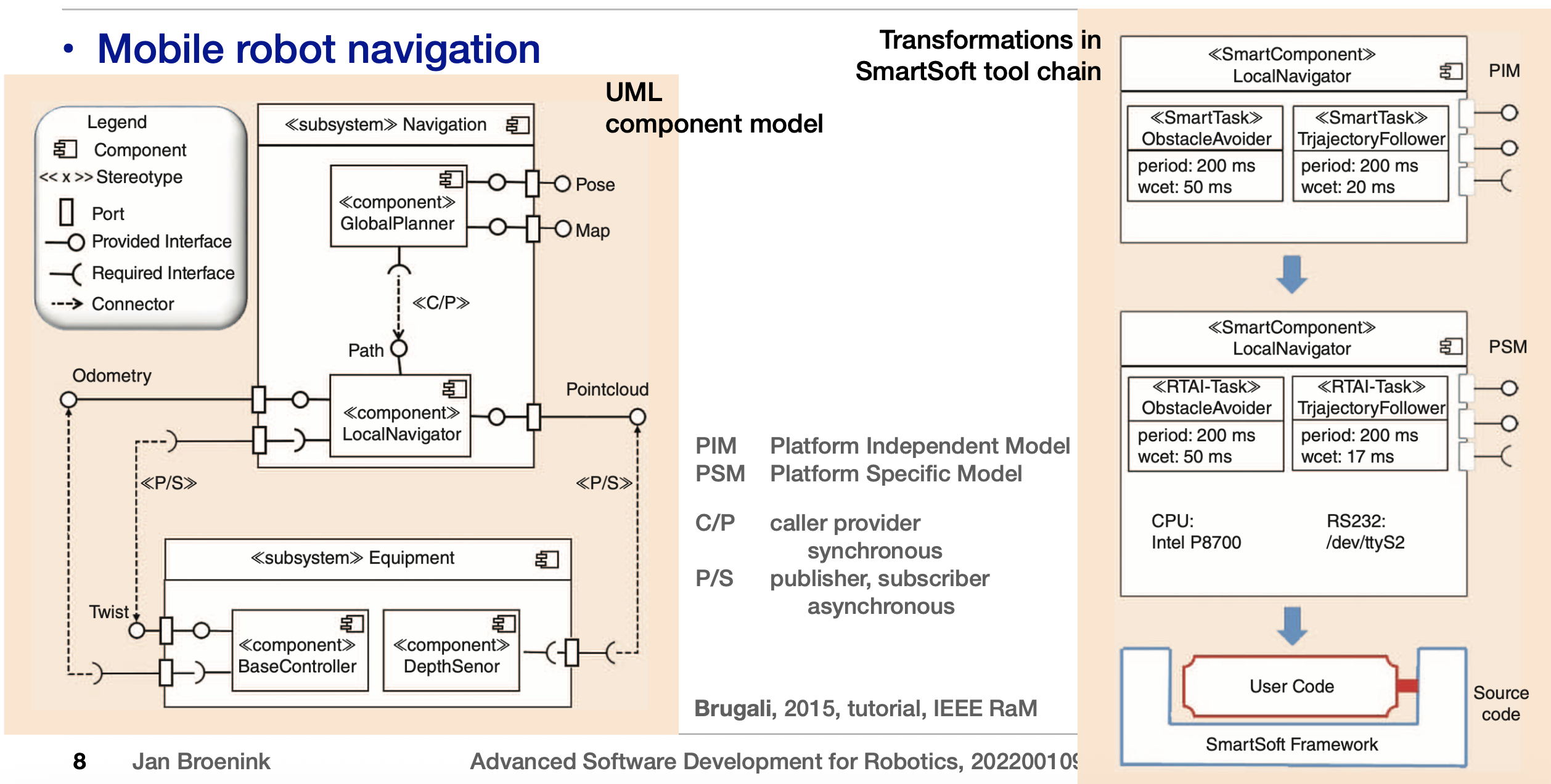
Model-driven Software Engineering in Robotics
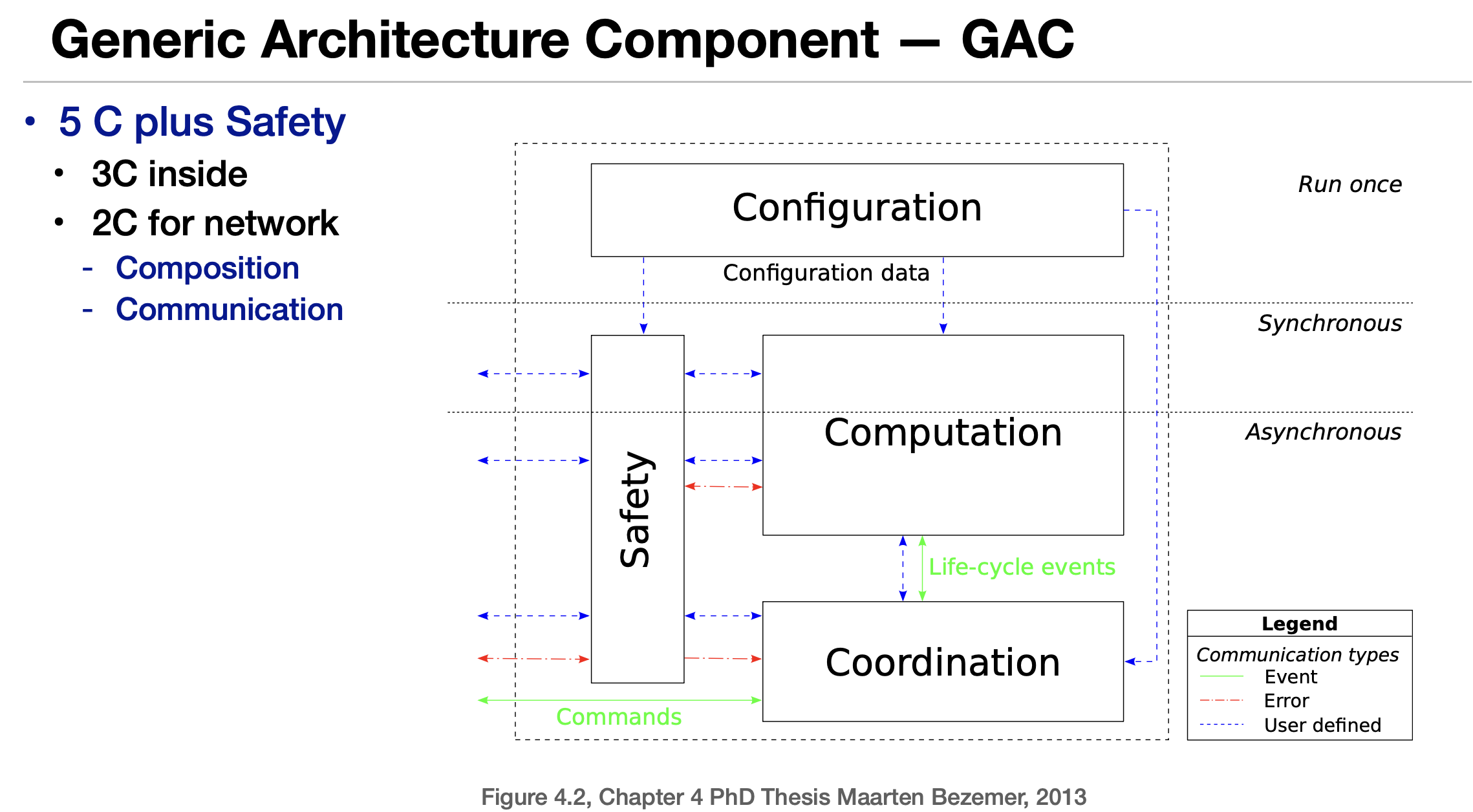
5 concerns that you need to pay attention to when building your software
- Computation
- What functionality is computed? i.e. the Algorithm
- Coordination
- When must components change their behavior?
- Configuration
- What parameters define the behavior of all components?
- Composition
- How are configurations, computations, communications, and coordinations interacting?
- Communication
- How are results of computations being communicated?