Coordinate Systems
Intrinsic camera calibration is the process of determining the internal geometric and optical characteristics of a camera. These parameters are essential because they allow a robot to convert a 2D image pixel into a 3D direction in the real world.
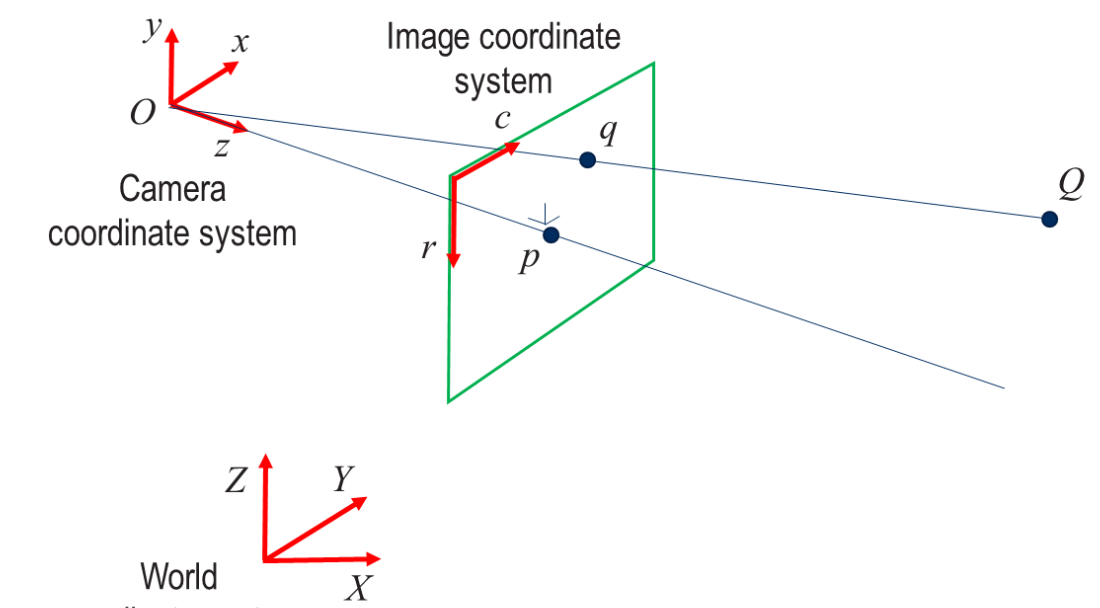
Measurements in images are used to retrieve information on the imaged objects. The calculations involve three coordinate systems:
- The 3D World in which the imaged object should be described,
- the 2D Image in which the measurements are done,
- The 3D Camera.
Core Intrinsic Parameters
Focal distance ( or ): It describes the distance from the lens center to the image sensor. Recall the lens formula with the object distance and the image distance. is also called the principal distance (or camera constant).
It reads as: to obtain a sharp image of an object positioned at distance from the camera, the distance between the lens and the image plane should be .
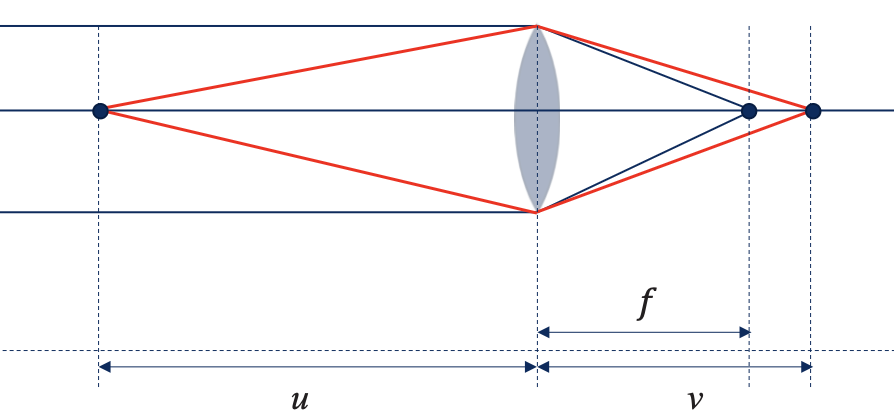
However, in practice, the focal length of a camera is often very small compared to the object distances, and hence is very small compared to and . As a consequence, the difference between and is ignored and the focal length is also considered to describe the distance between the lens and the image plane.
- For distant objects, can be set to .
- For nearby objects, cannot be set to .
Principal Point () is the intersection of the optical axis of the lens with the image plane. is only approximately at the center of the CCD / CMOS chip. Therefore, calibration is needed. Due to lens imperfections, images may show radial and tangential distortions. The radial distortions are symmetric around the principal point. Coordinates in the camera coordinate system are considered free of distortions.
**Relation between image coordinate system and camera coordinate system
Let and be the sizes of a pixel in respectively the row and the column direction. For an arbitrary point , the relation between its image coordinates and its camera coordinates is then given by
- with as the coordinates of the principal point .
The focal length and the principal point describe the location of the lens centre w.r.t the image plane, i.e. the CCD or CMOS chip.Together with the pixel sizes and , the location of a point in the image can be converted to a three-dimensional vector in the camera coordinate system. Together with the lens distortion parameters , the 4 highlighted concepts constitute the intrinsic camera parameters.
The required accuracy of intrinsic camera parameters
Consider the parameters
- ,
- pixel size
- Assume is in the centre: pixels
- Maximum ratio
The equation converts world coordinate X to pixel coordinate c.
Furthermore, pixel/mm, this derivative shows how pixel position changes when focal length changes.
Suppose you get so . For this small error, we get pixels. The coordinate error of 3.38 pixels is far more than a measurement error of 0.1 — 0.5 pixels. Focal length must be calibrated very accurately.